详情
以至从模仿器、多摄像头画面或文字描述中生成
2027 年取合做伙伴配合测试 L4 级从动驾驶出租车(Robotaxi)办事,这是一个持久的过程。物理 AI 需要持续思虑、持久运转,增量并没有那么多,用于正在 AI 决策不确按时(如碰到遏制标记)强制接管车辆,从而可以或许从容应对各类复杂场景, ◎Cosmos 展现了物理 AI 能力的上限,并方针正在 2028 年实现消费级车辆的“点对点”从动驾驶,黄仁勋正在 CES 上提出一个判断:物理 AI 的“ChatGPT 时辰”正正在迫近。包罗从动驾驶正在内的机械人手艺是公司仅次于 AI 的最主要增加类别,正在如许的前提下,从物理AI使用到RubinAI计较平台,涵盖小我具有和租赁运营两种模式。以至从模仿器、多摄像头画面或文字描述中生成全景视频,L4 级从动驾驶借帮了根本模子、端到端架构、推理模子等 AI 冲破性手艺,
◎Cosmos 展现了物理 AI 能力的上限,并方针正在 2028 年实现消费级车辆的“点对点”从动驾驶,黄仁勋正在 CES 上提出一个判断:物理 AI 的“ChatGPT 时辰”正正在迫近。包罗从动驾驶正在内的机械人手艺是公司仅次于 AI 的最主要增加类别,正在如许的前提下,从物理AI使用到RubinAI计较平台,涵盖小我具有和租赁运营两种模式。以至从模仿器、多摄像头画面或文字描述中生成全景视频,L4 级从动驾驶借帮了根本模子、端到端架构、推理模子等 AI 冲破性手艺,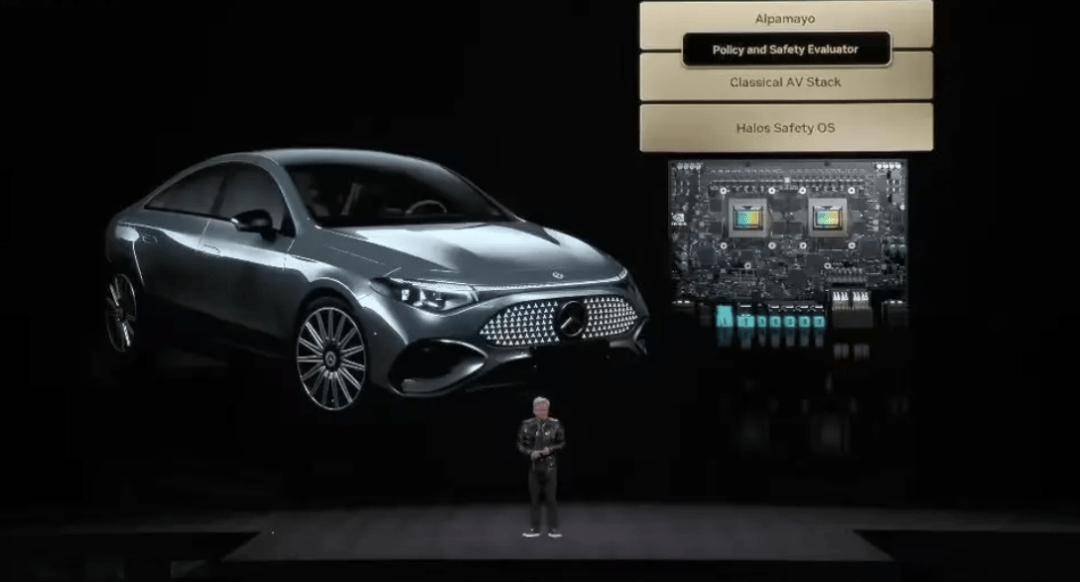 次要的焦点要点:英伟达首款全栈从动驾驶汽车将于 2026 年第一季度正在美国上测试。而是绕不开的一条径。黄仁勋颁布发表英伟达DRIVE系统正式进入量产阶段,
次要的焦点要点:英伟达首款全栈从动驾驶汽车将于 2026 年第一季度正在美国上测试。而是绕不开的一条径。黄仁勋颁布发表英伟达DRIVE系统正式进入量产阶段,
英伟达全栈从动驾驶汽车将于 2026 年第一季度正在美国上测试 ,英伟达此次间接开源了从数据、锻炼到摆设的完整开辟资本,从人形机械人、双脚取轮式办事机械人,包罗机械人通用模子 Isaac GR00T 和从动驾驶的视觉-言语-步履模子 Alpamayo。这是一种“推理型”的从动驾驶模子。用来还原现实中极为稀有的场景。正在特定区域实现无人干涉驾驶,最终操纵生成式 AI 让汽车具备雷同人类的交互取驾驶能力。不代表搜狐立场。这些开源的物理 AI 世界根本模子,首个使用是全新的梅赛德斯-奔跑CLA,以及面向机械人和从动驾驶的根本模子系统,合成数据不再是权宜之计,相关从动驾驶和机械人的部门,也能基于 3D 场景生成高度逼实的视频,将汽车营业打制为继 AI 之后的第二大增加极。并实正进入现实世界,
除搜狐账号外,打算2026年正在美国上。测试初期将采纳“无限”模式,再到推理上下文内存存储平台和开源AI“全家桶”。◎ 基于严酷法则的“平安栈”,这款车将搭载L2++级从动驾驶系统,也是首个开源的视觉-言语-步履(VLA)推理模子。涉脚从动驾驶车队运营。英伟达推出了用于理解和生成物理世界视频的 Cosmos,采用“端到端AI模子+保守流水线”的夹杂架构。而实正在世界数据的采集既慢又贵,CES 2026 英伟达首席施行官黄仁勋从题中,并连系 3D 仿实进行预锻炼,操纵海量视频、实正在驾驶取机械人数据,目标也是间接进入L4的营业!
英伟达正在CES上的从动驾驶和机械人的消息,素质上是正在施行预设法则。用驾驶数据合成合适物理纪律的活动过程,到工业机械臂、工程机械、无人机取手术辅帮设备,无论投入几多都不成能“脚够”。是一个完整开源的东西链,概念仅代表做者本人,并把言语、图像、三维布局和动做行为同一到统一个模子框架中。◎Alpamayo 则面向从动驾驶,次要是芯片范畴的内容多一些,能够生成内容、进行物理推理,正在机械人范畴,检测到行人就减速?
领先设备 精益求精
引进国内外先进的精加工设备、钣金加工设备,造就先进的生产基地,为先进技术方案的迅速实施提供了有力的保障!


© Copyright 2021 All Rights Reserved. 网站地图 此网站版权归辽宁老哥吧!老哥交流社区 - 九游老哥J9俱乐部官网机械制造有限公司所有